安思疆不仅在3D结构光领域拥有业界领先的成熟产品,而且在经过近2年的持续潜心研发之后,发布了基于dToF单光子探测技术的全新3D Lidar产品。同时,安思疆也于近日完成了5000万元A+轮的融资,由本源创投和鸿泰国微基金联合投资。
深圳市安思疆科技有限公司(Angstrong Tech.)是一家专注于三维传感及视觉AI技术的高科技公司。安思疆不仅在3D结构光领域拥有业界领先的成熟产品,而且在经过近2年的持续潜心研发之后,发布了基于dToF单光子探测技术的全新3D Lidar产品。同时,安思疆也于近日完成了5000万元A+轮的融资,由本源创投和鸿泰国微基金联合投资。
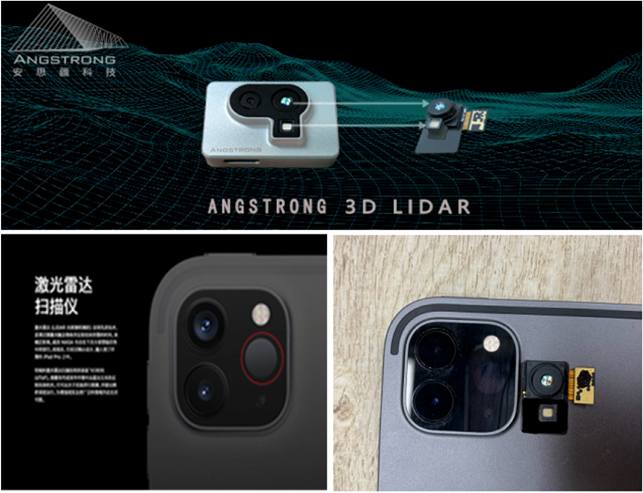
苹果在2020年3月发布了新一代iPad Pro 2020,并在后置摄像头模组中,搭载了其研发的全新3D LidarScanner,这是该技术首次在消费电子产品中实现规模化应用,而在此之前,该技术主要应用于车载自动驾驶领域。苹果在其AR软件生态开发套件AR Kit升级了3代之后,终于在后置摄像头上也迎来了3D硬件的支持,受益于深度信息的引入,Lidar Scanner大大增强了AR应用的体验。苹果在AR领域的野心和实力已经“昭然若揭”,因此新iPhone以及未来的“Apple Glass”搭载Lidar几乎已成必然。
iPad Pro激光雷达 安思疆激光雷达
安思疆科技CTO鲁亚东博士表示,将车载领域使用的Lidar移植到消费级电子产品上难度巨大,必须满足小型化、低功耗、低成本等要求。其中,仅小型化就对光学设计以及光电器件的制造与集成提出了新的且极高的要求。此外,虽然Lidar使用的也是ToF技术,但苹果和安思疆Lidar产品中使用的是基于SPAD(单光子雪崩二极管)的dToF技术,而目前市面上还主要是基于普通CMOSPD的iToF技术,两者存在着非常大的差别。
安思疆首席科学家、浙江大学光电学院副院长、AR/VR及三维传感领域专家,郑臻荣教授对dToF前景非常看好,并表示相对于iToF技术,dToF技术有众多优势,可理解为技术的升级。近年来图像传感器的迅速发展,使得SPAD的技术已经相对成熟,而且各项性能指标的发展路径也非常清晰。从安思疆最新的产品来看,其在手机、平板、扫地机器人、行业机器人、AR/VR眼镜等领域的应用前景非常广阔,相信很快就能实现落地应用。
公司联合创始人、SVP、衍射光学顶级专家,蒋建华博士则表示,苹果在其最新的Lidar产品中同样使用了与前置3D结构光类似的DOE衍射光学器件、VCSEL激光芯片以及Collimator准直光学透镜,虽然增加了系统设计的难度和壁垒,但这对整个Lidar系统的小型化起了至关重要的作用。安思疆在上述器件及系统设计方面都有非常深厚的理论和产业积累,这也是为什么我们在当前时间点就能推出可量产产品的原因。
目前市场上已推出可应用于消费电子产品dToF方案的公司只有苹果。因此,大多数人对dToF这项技术比较陌生,为了让大家快速了解dToF产品、技术及应用,以下是由安思疆的专家团队带来的dToF技术解读。
iToF和dToF技术解读
ToF是时间飞行技术(Time of Flight)的简称,即时差测距技术,搭配面阵传感器,可获取现实三维场景完整的几何信息,实现真实世界场景的3D数字化,在消费电子、汽车工业、智能家居等对3D感知有需求的行业拥有巨大的应用价值与市场前景。根据不同的时间测量方式,目前存在两种ToF技术路线:iToF(间接飞行时间,indirect-ToF)和dTof(直接飞行时间,direct-ToF)。
基于低偏置PD的iToF技术
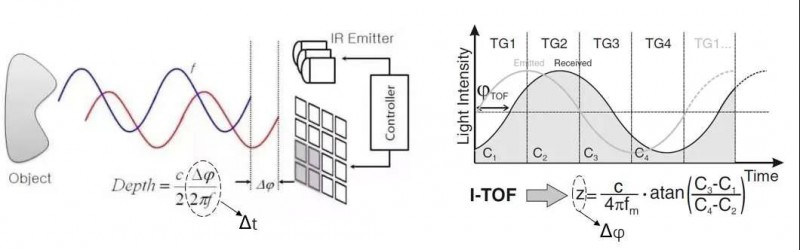
iToF顾名思义是间接测量时间的一种方法,大部分的间接测量方案都是通过sensor所采集不同时间窗口的接收光能量比值关系,进而解算出相位差,再换算出发射光波与接收光波的时间差Δt,根据光速值c,即可通过d=c*Δt/2得到距离深度。其发射光波的调试方式一般有正弦连续波调制和脉冲波调制两种方式,对应探测器中每个像素都有两个以上电荷积累区域来完成光信号的积分采集,探测器一般使用的是具有光电子积累作用的CMOS或CCD,一般偏置电压3V~5V,其无法区分背景光子与有效信号光子,受光子噪声影响很大,需要足够高的信噪比才能提取出每个像素的有效深度信息,通常采用加大发射端的发射功率和提高接收端的曝光次数、曝光时长(降低帧率)来达到足够高的信噪比要求,不可避免会带来高功耗等问题。
连续波调试iToF示意图
脉冲波调试iToF示意图
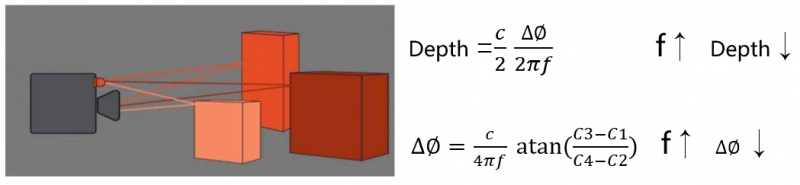
在iToF技术中,系统的测距精度与调制光波的相位差解析精度成正比,系统的测距范围与调制光波的频率成反比。频率越低,虽然测距范围增大了,但会带来相位差的解析精度下降,进而测距精度随之下降,因此iToF的测距精度随距离增加而下降。在一些产品中,为了平衡这一矛盾,采用了双频或者多频的技术,即在不同距离采取不同的调制频率,不过这就增加了系统复杂度,而且当场景中存在深度跨度比较大的情况下,仍然会出现问题。而dToF由于技术原理不同,则天然不存在此问题。
iToF距离与测距精度的矛盾关系
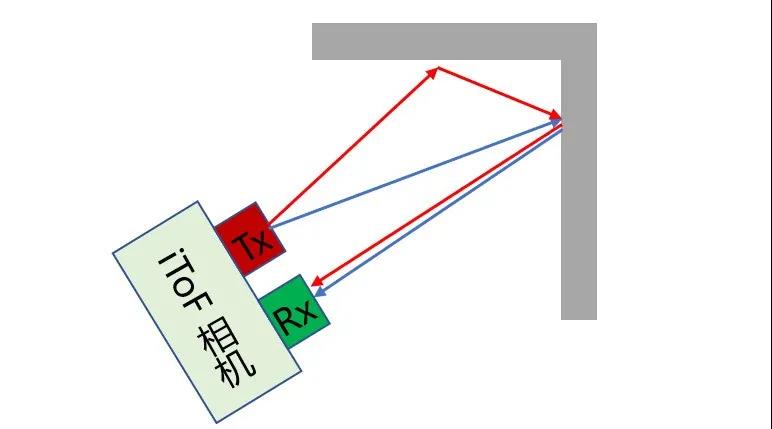
此外,iToF技术中的相位差本质上是通过iToF CMOS sensor所采集不同时间窗口的接收光能量比值关系得到的,因此属于传统的光子能量积分的信号采集方式,在像素的曝光时间内不断收集接收光子的能量,而不去区分具体光子到达的时间,也就无法区分光子的具体飞行路径所对应的飞行时间,则会存在多径干扰问题。同理,在物体边缘所对应的成像像素区域,会同时接收前景和背景反射回来的光线,所收集的光子能量叠加在一起,进而去解算一个平均的相位差,得到的是平均ToF值。因此,从技术原理上iToF一定会存在物体轮廓不清、棱角形状失真、无法区分相邻两物体等问题,为了解决这类问题,需要对初始深度做比较重的后处理算法,但会增加AP负担,且可能影响实时性。
多径干扰:理想情况是按照蓝色路径进行测距,但是墙面等物体的反射光也会传播到目标物上再经过反射回到相机(红色光路),且实际会存在多条路径
多径干扰(Multi-Path)是iToF存在的严重的问题之一,这一问题目前很难解决,会导致比如深度错误,直角变圆角,镜像等问题。而dToF受益于其测量原理,则没有这一担忧,非理想路径的其他路径能够很容易地被滤除。
基于高偏置SPAD的dToF技术
SPAD工作原理及光电特性
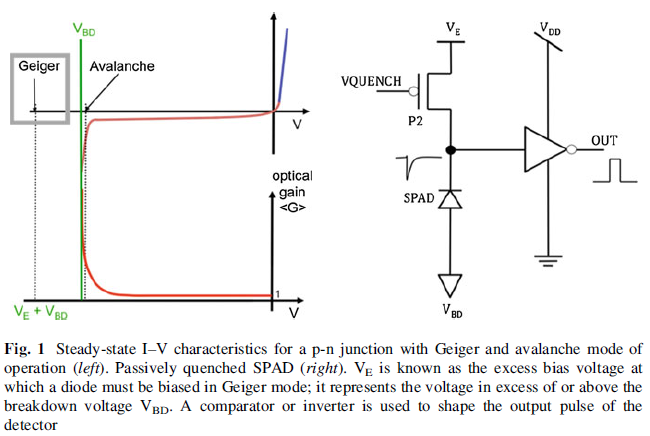
dToF技术则实现了对飞行时间Δt的直接测量,采用脉冲信号方式,sensor内部的每一个像素都直接测量达到光子的往返时间,具有灵敏度高的优点,避开了测量往返信号的相位差所引入的各种问题,并且不存在光电子积累的过程,其测量精度受光噪声的影响比较小,较低的信噪比要求有利于系统功耗的下降。dToF系统需要一个高速的光电探测器和高精度的时间数字转换电路,即SPAD+TDC的组合,其中SPAD是单光子雪崩二极管Single Photon Avalanche Diode,这是一种能够在ps(10-12s)级的时间内对微弱光信号产生强响应的器件,其原理是高偏置,深势阱的结构可诱发单光子产生雪崩电流,这也是为什么自动驾驶中的Lidar系统必须使用雪崩二极管来探测远距离反射回来的光信号,而一般CMOSsensor是很难做到的。TDC是时间数字转换器TimeDigital Converter,类似于日常生活中的秒表,能够记录光子每次“折返跑”的时间。
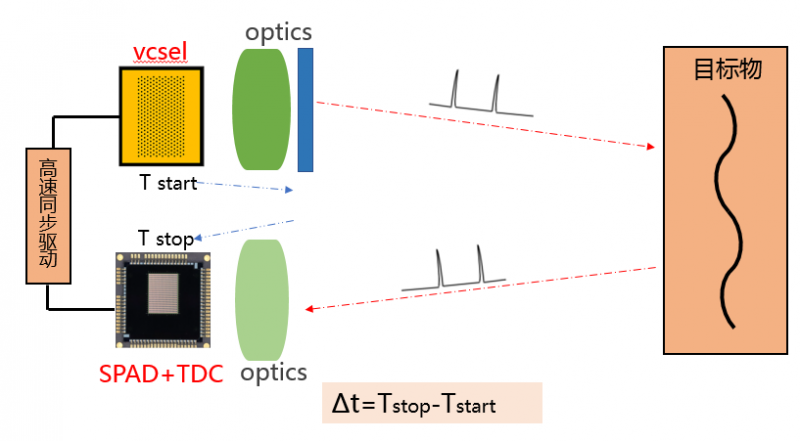
dToF系统示意图
dToF激光发射端采用极窄脉冲调制方式,单个发光脉宽可达数百皮秒级别,占空比可低至0.1%,因此发射端的平均功耗比iToF低很多。发射端通过高速信号连接与接收端的TDC进行精准时间同步,发射光经过前方目标折返后,处于接收端的SPAD sensor能对光信号进行ps级的超高速光电转换,产生脉冲电流,这一脉冲电流会将计时‘掐断’,此时TDC即可直接得到光信号的飞行时间Δt。由于是直接对飞行时间进行测量,不存在解析相位差精度与频率的反比关系问题,因此dToF在信噪比能保证的情况下精度不随距离增加而下降。
进一步,dToF系统还会采用时间相关单光子计数方法(Time-Correlated Single-Photon Counting,TCSPC)来最终准确计算目标与传感器之间的距离。TCSPC因其能够对时间信息进行准确测量而被广泛应用于核物理及天文领域,在生命科学领域也有很大的应用空间,如荧光相关光谱、荧光寿命成像、荧光共振能量转移技术等。
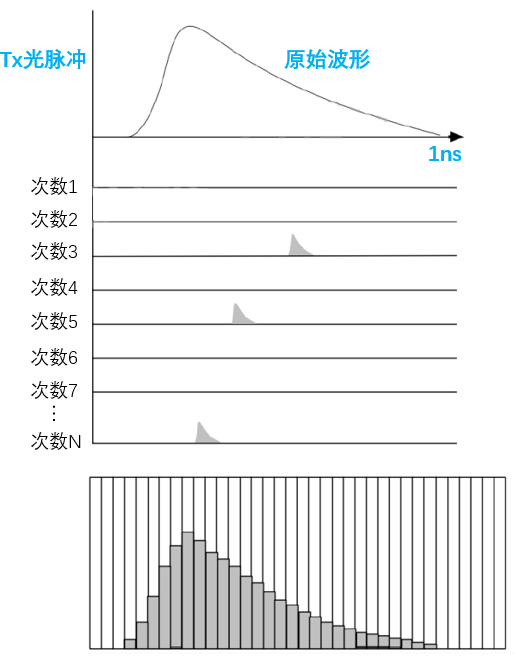
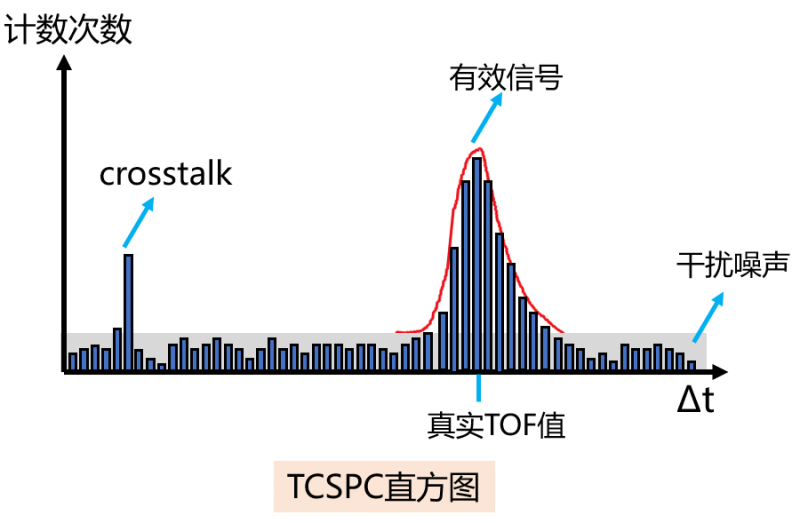
TCSPC基本原理简单来说是在单帧成像周期内,会有N次的光脉冲发射与接收,TDC能够记录n次(n<N)光飞行时间,于是生成一个飞行时间关于计数次数的直方图分布,采用极值求解算法可以计算出,出现次数最多的飞行时间值,即为最终目标值Δt。通过运用TCSPC技术,在满足单光子入射条件下,dToF能够有效的去除器件固有噪声和环境光噪声,它们引起的计数次数将远低于有效信号的计数峰值,从直方图上能很容易甄别出来,因此dToF对环境光的抗干扰能力远大于iToF,这也是为什么dToF不存在多径干扰问题的原因。同时TCSPC技术对目标物进行多次飞行时间的重复测量,会进一步提高系统的时间分辨率。在相同的光脉冲能量下,单帧成像周期的Tx光脉冲数量越多,也即SPAD的“曝光”次数越多,系统的测距精度、测距距离和抗干扰能力越优秀。
TCSPC计数原理
目前影响SPAD性能的因素主要有,光子探测率PDE、暗计数率DCR、时间抖动、像素串扰等[4][5][6][7],经过多年的发展,目前的工艺水平已经能够很好的把这些问题都解决,比较成熟,不再赘述。影响系统精度和深度效果的因素主要有:
a.单位时间的光发射次数,即驱动频率;
b.单脉冲宽度;
c.光脉冲峰值功率以及TDC响应速度
以上因素也指明了dToF技术的发展路径,即SPAD,驱动电路,激光光源,光学系统等有比较明确的发展方向,而目前看来并没有瓶颈。
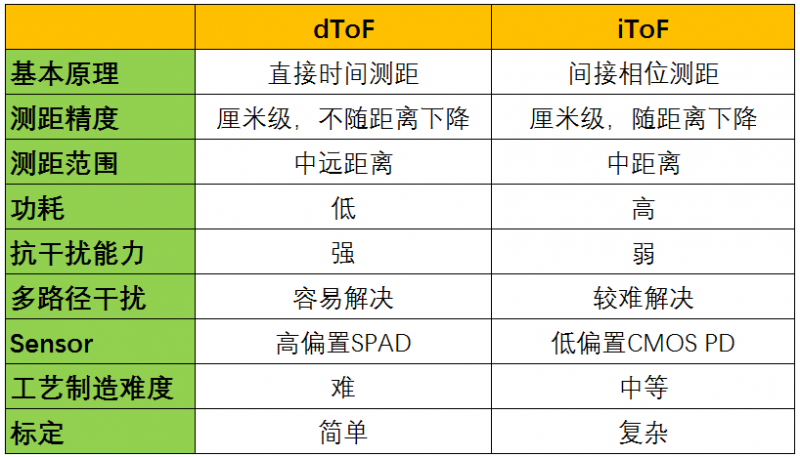
dToF与iToF的对比
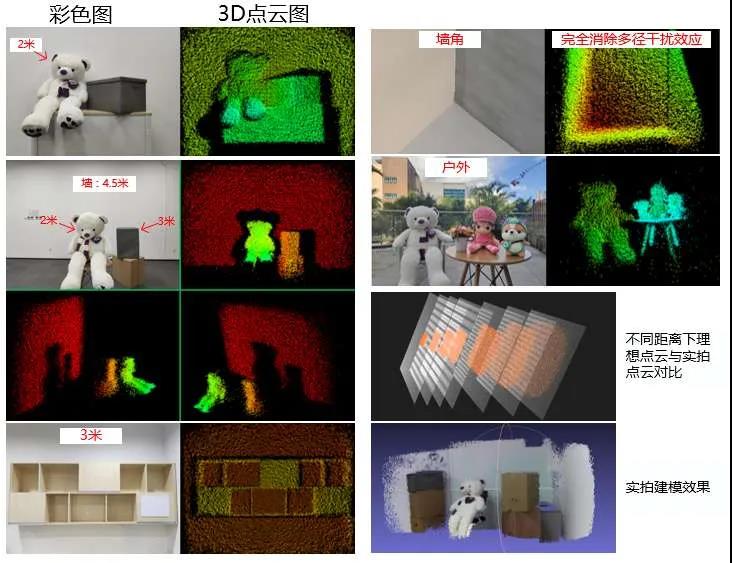
实测效果
Lidar Scanner及3D结构光iOS APP推荐
实拍安思疆Lidar 3D效果
CEO李安认为,dToF技术性能相比于iToF的提升是毋庸置疑的。团队从理论研究,到概念设计、系统设计、样品验证、测试、改进、再改进…经历了近2年的时间,数次迭代,花费近千万,完成了从0到1再到10。从实测效果可以看出第一代产品已经能达到非常好的效果,目前最远可测到~7m,FOV 78°,功耗~500mw 5m,精度~1%,提供QVGA和HQVGA两种分辨率接口。dToF技术涉及到投影及成像光学设计、单光子检测技术、高速模拟电路、数字电路、视觉标定算法、三维图像处理算法等,技术壁垒很高。这一复杂的产品能在苹果发布后,如此快的时间内推出,除了我们团队扎实深厚的基础之外,供应链合作伙伴的表现也非常优秀,目前VCSEL、SPAD、DOE/diffuser、光学镜头等核心器件基本实现国产化,并且全部达到可量产状态,没有瓶颈,并且成本完全可控。
同时李安也称dToF产品在手机平板等移动终端、AR/VR眼镜、扫地机器人、导航/避障等对功耗、体积、成本等要求较高,且精度、分辨率等要求不像3D结构光那么严格的场景中适用;而在FaceID、刷脸支付、智能门锁、工业测量/3D建模等一些对精度要求比较严格的场景中,3D结构光目前则更为适用;未来dToF与结构光是共存互补的关系,安思疆将在这两个方向上踏踏实实往前推进。
另外,就A+轮融资而言,本轮资金将投入于扩充已有3D结构光产品线,以及dToF的研发和落地。实际上,公司已经开始研发超小尺寸,超低功耗的Spot dToF产品。安思疆将继续高效创新,持续给市场带来惊喜,同时也欢迎更多人才加入安思疆。


 旭日大数据
2020-08-17 16:23
旭日大数据
2020-08-17 16:23



 潮电智库
11-23
阅读(6045)
行业资讯
潮电智库
11-23
阅读(6045)
行业资讯







