智能手机摄像头用量提升的趋势仍处于加速态势,特别是3D摄像头等新创新的使用也将为手机摄像头领域提供增益。3D摄像趋势所致,高端手机势必成为标配。3D摄像搭载3D感应、建模、structure light 、TOF软体算法。
Real time 3D depth & capture
3D 摄像在手机硬件技术structure light 和 TOF,3D摄像搭载软体算法可实现避障,3D摄像提供一种基于TOF技术的红外避障方案,单芯片同时能够精准测距、3D图形构建、手势识别。距离远、精度高、延迟少。3D摄像structure light 和 TOF在检测距离上、精度、检测速度上相差不大,区别在于:结构光方案优势在于技术成熟,深度图像分辨率可以做得比较高,但容易受光照影响,室外环境基本不能使用;而TOF方案抗干扰性能好,视角更宽,不足是深度图像分辨率较低。
TOF
即Time ON Fly,利用红外光在空气中的飞行时间,算出距离物体距离。
TOF测距距离远,精度高,相比超声波测距优势很大,同时多点感应的TOF芯片,比如8*8=64点感应的,更精确的有240*320的,可以实现构建物体3D模型,应用非常广,比如扫描房间轮廓,构建地图、识别手势,比目前常用手势识别IC智能识别上下左右前后等更灵活。
TOF测距原理
利用红外光在空气中的飞行时间,算出距离物体距离
Stucture light
Stucture light是3D扫描的一个光学方法,它投射出一组用数学方法构造的光图形,按照一定顺序照亮被测量的物体。一个到投影仪的距离已知的摄像头同步捕捉一组被照亮物体的图像。相对于用于校准的平面基准表面,摄像头看到的图形被经扫描物体的表面形状所扭曲。几何三角剖分的原理使得计算被扫描物体表面上每个点的XYZ坐标成为可能(见图)。然后,获得的点云数据用于被扫描物体表面详细3D模型的计算构造
Stucture light原理
3D扫描的一个光学方法,它投射出一组用数学方法构造的光图形,按照一定顺序照亮被测量的物体
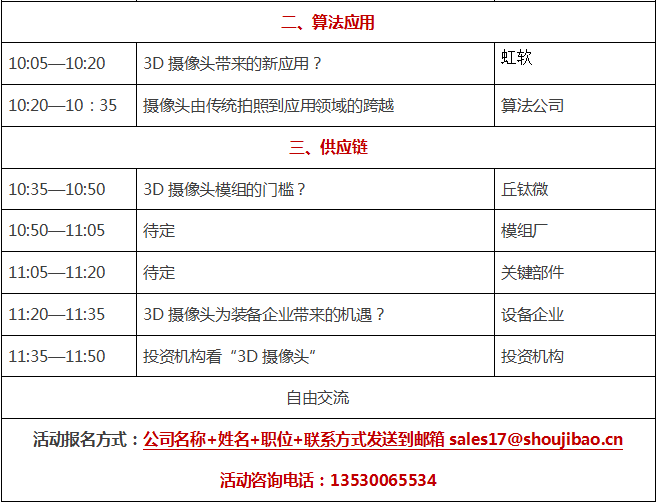
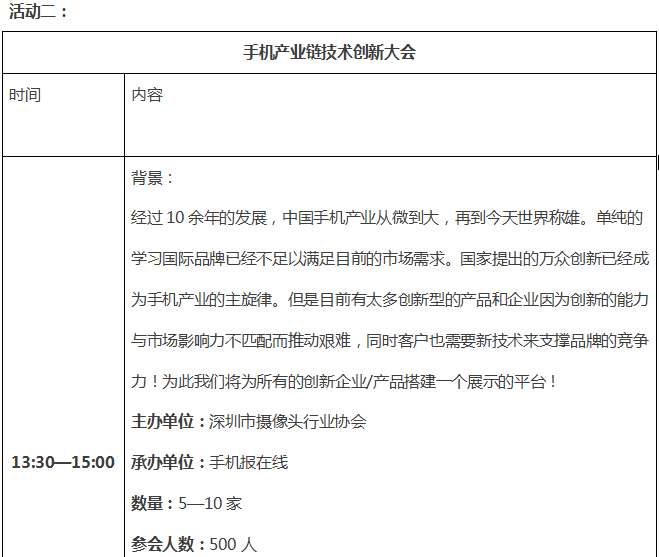
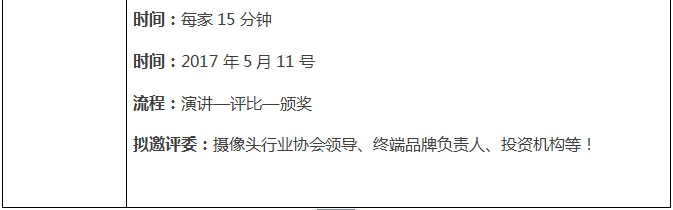
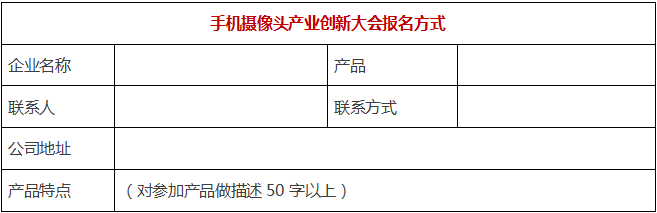
为全方位、深层次加强在智能终端3D摄像头领域的交流合作,更大力度汇聚创新资源,加快打造只能终端产业集群,进一步夯实摄像头资源共享为基础,营造良性发展的环境和氛围。2017年5月11号在深圳举办3D摄像高峰论坛
请详细填写上述表格发送至参会邮箱:sales17@shoujibao.cn
咨询电话:13530065534 毛成
赶紧拿起电话吧!市场需要你!
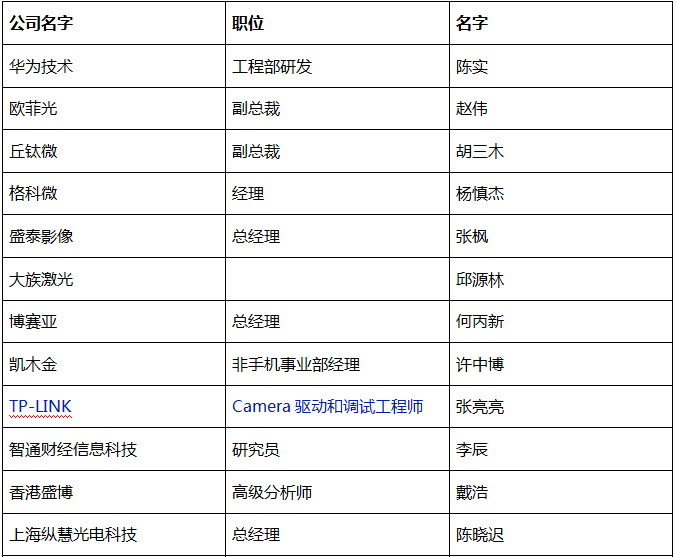
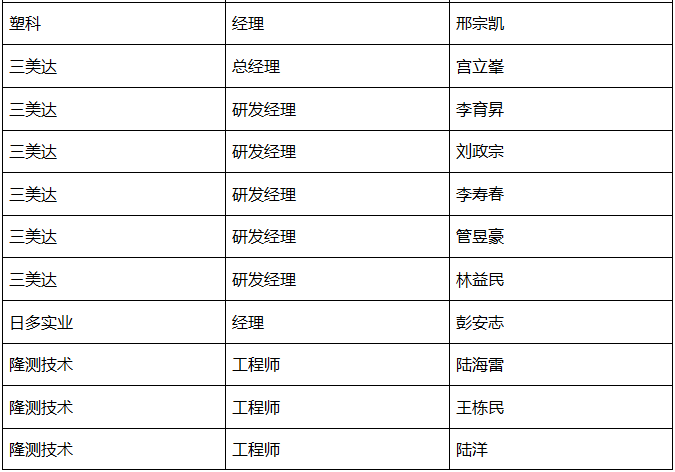
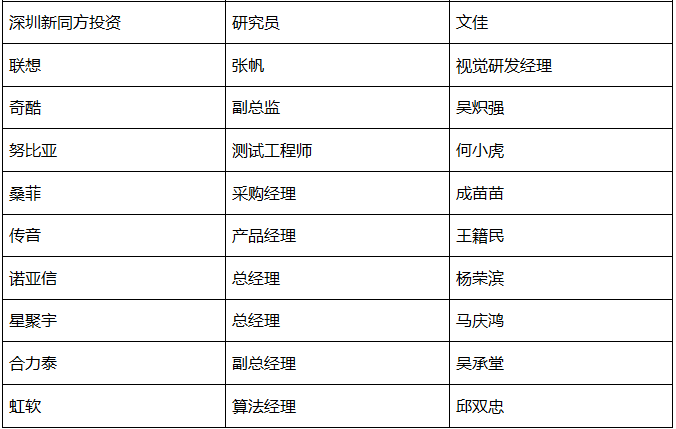
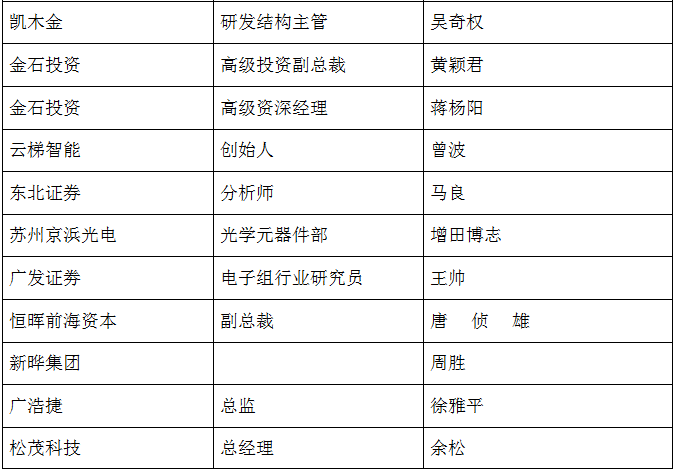
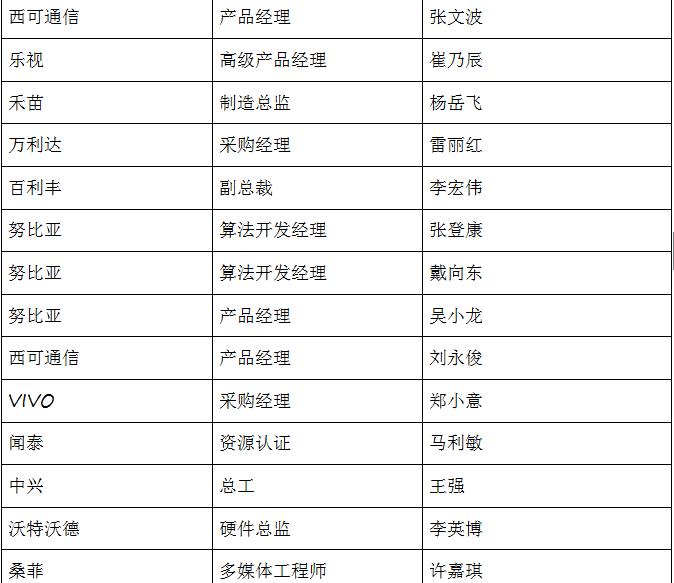
2017年4月最新报名名单
活动火热报名中......


 手机报
2017-04-14 16:06
手机报
2017-04-14 16:06












 手机报
04-19
阅读(6231)
原创专栏
手机报
04-19
阅读(6231)
原创专栏